RUFOR.ORG
»
АПР-2 ЯСТРЕБ Авиационная противолодочная реактивная ракета
| Новая тема Ответить |
|
|
Опции темы | Поиск в этой теме | Опции просмотра |
 25.05.2020, 23:41
#1
25.05.2020, 23:41
#1
|
#1 | ||


Чебуралиссимус
|
 АПР-2Э Орлан АПР-2Э Орлан Страна: Россия (СССР) Тип: Авиационная противолодочная реактивная ракета Первоначально системой управления ракеты занимался ЦНИИ АГ. В скоре было предложено создать ракету с улучшенными характеристиками, предложенную ленинградским филиалом НИИ-30 МО. И она получила обозначение Ястреб-М. Действующий макет системы управления для новой модификации был разработан на кафедре Гидроакустики МГУ им Ломоносова и НИИПМР. Создание системы управления для бое вой ракеты было поручено НИИ Радиотехнической аппаратуры под руководством Б.В.Карпова. Ракета Ястреб-М создавалась как составная часть авиационных противолодочных комплексов для вооружения самолетов и вертолетов. В создании ракеты Ястреб-М принимали участие: Научно-исследовательский Инженерный институт. Томский НИИ Электромеханики, Ленинградский НИИ Поиск. КБ Киевского завода им. Петровского, Пермское НПО им. Кирова. Московский НИИ Квант и др. Ракета Ястреб-М создана на базе противолодочной ракеты АПР-1 Кондор и предназначена для поражения состоящих на вооружении и перспективных подводных лодок (ПЛ) на глубинах до 600 м при скорости их хода до 80 км/ч. В состав основных частей ракеты входят: головной обтекатель, приборы системы наведения, боевая часть, двигатель, рулевой отсек и тормозная система. Морские испытания ракеты Ястреб были начаты в 1969 году. Государственные испытания ракеты Ястреб-М были завершены в 1976 году. После принятия на вооружение ракета получила обозначение АПР-2. На ракете АПР-2 применена гидроакустическая система с использованием комбинации корреляционно-фазового метода обработки гидроакустической информации с методами согласованной фильтрации и амплитудной селекции. Технические решения. примененные на АПР-2, позволяют работать системе обнаружения и пеленгования (СОП) при работающем двигателе. Боевая часть для ракеты была создана в НИИМаше, в отличие от ракеты Кондор (АПР-1) новая БЧ имела более мощный состав ВВ, что позволило снизить массу БЧ при сохранении эффективности. Вероятность поражения цели при среднеквадратичной ошибке целеуказания 300-500 метров составляет 0,7-0,85. 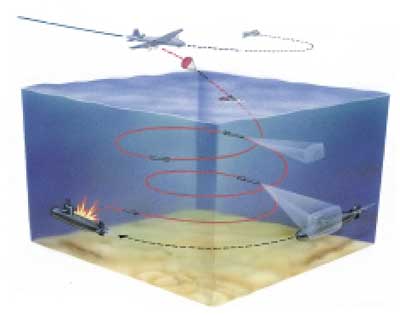 Перед сбросом ракеты с носителя вводятся данные целеуказания, режим полета, подключается бортовое питание. На заданной высоте, после отделения от носителя, срабатывает тормозная парашютная система. При приводнении происходит отделение парашюта и защитного носового обтекателя, заглубление происходит под углом 17 град.За счет спирального движения ракеты под воздействием сил гравитации без включения двигательной установки ракета осуществляет сканирование пространства в пассивном режиме поиска в бесшумных условиях. В случае не обнаружения цели до глубины 150 метров включается двигательная установка и ракета продолжает поиск в активном режиме. На базе ракеты Ястреб-М в 1984 году была создана экспортная модификация Ястреб-Э, которая прошла испытания и получила обозначение АПР-2Э. Ракета АПР-2Э была поставлена в ряд зарубежных стран. При эксплуатации ракета АПР-2Э снабжена: комплектом для стыковки со станцией автоматического контроля АКИПС-1 для проведения технического обслуживания; комплектами запасных частей с основными блоками; комплектами учебных пособий, в том числе учебно-разрезной ракетой А2У, учебно-практическим изделием ПА-2 и комплексным учебным имитатором А4.
Последний раз редактировалось ezup; 25.05.2020 в 23:50. |
||
  |
| Новая тема Ответить |
| Метки |
| авиация |
 Линейный вид
Линейный вид

|
|
 Похожие темы
Похожие темы
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| АПР-1 КОНДОР Авиационная противолодочная реактивная ракета | ezup | Россия | 0 | 25.05.2020 23:20 |
| Авиационная противолодочная подводная ракета АПР-2 «Ястреб» (СССР) | ezup | Ракеты | 0 | 31.07.2015 13:12 |
| Авиационная противолодочная ракета АПР-3 Орёл-М | ezup | Противолодочные | 0 | 29.10.2013 01:27 |
| Противолодочная авиационная ракета АПР-3/3М «Орёл-М» | ezup | Ракеты | 0 | 01.09.2012 17:45 |
| Авиационная противолодочная ракета АПР-3 Орёл-М | ezup | Ракеты | 0 | 08.08.2012 00:47 |