RUFOR.ORG
»
Опытный вездеход-транспортер ЗИЛ-135Ш
| Новая тема Ответить |
|
|
Опции темы | Поиск в этой теме | Опции просмотра |
 24.02.2018, 19:11
#1
24.02.2018, 19:11
#1
|
#1 |


Чебуралиссимус
|
На протяжении долгих лет Специальное конструкторское бюро Завода им. И.А. Лихачева разрабатывало проекты техники сверхвысокой проходимости. Основным заказчиком подобных машин было министерство обороны, но с определенного времени в такой роли начали выступать иные ведомства. Так, в начале шестидесятых годов началось сотрудничество СКБ ЗИЛ с предприятиями космической отрасли. Одним из самых интересных его результатов стал опытный вездеход-транспортер ЗИЛ-135Ш.
К середине шестидесятых годов советская космическая программа столкнулась с определенными трудностями логистического характера. Космические ракеты строились на заводе «Прогресс» в г. Куйбышев (ныне Самара), после чего в разобранном виде по железной дороге доставлялись на космодром Байконур, где осуществлялись их окончательная сборка и подготовка к запуску. Пока речь шла о ракетах-носителях на основе платформы Р-7, такие методы выглядели приемлемыми. Однако уже велась разработка «лунной» ракеты Н-1, отличавшейся увеличенными габаритами. Доставка ее агрегатов на космодром была связана с серьезными проблемами.  Макетный образец ЗИЛ-135Ш на полигоне. Фото Русская-сила.рф Рассматривая альтернативы железнодорожному транспорту, специалисты ОКБ-1 во главе с С.П. Королевым предложили оригинальный вариант доставки агрегатов ракет на Байконур. Ступени предлагалось строить в Куйбышеве, после чего на специальной барже следовало везти их по Волге и Каспийскому морю к г. Гурьев (ныне г. Атырау, Казахстан). Там ракетную технику планировалось перегружать на специальный транспорт и по суше доставлять к космодрому. Для реализации такого предложения было необходимо создать речную баржу и сухопутную машину с приемлемыми характеристиками. В случае с наземным транспортом задача конструкторов усложнялась тем, что отдельные агрегаты будущей Н-1 могли весить не менее 20-25 т. Группа инженеров ОКБ-1 во главе с В.П. Петровым сформировали примерный облик будущего транспортера и сделали несколько важнейших предложений. Так, для обеспечения приемлемой подвижности и маневренности машина нуждалась в ориентируемых колесах по типу используемых на носовых стойках шасси самолетов. При этом желаемые характеристики проходимости и подвижности на степях Казахской ССР можно было получить только при применении колес диаметром не менее 1,5 м. Имея такую ходовую часть, будущий транспортер мог получить приемлемые размеры и показать желаемую грузоподъемность. Макет будущего полноразмерного транспортера с полезной нагрузкой. Фото Gruzovikpress.ru Сформировав примерный облик будущего транспортера ракетной техники, ОКБ-1 занялось поисками разработчика полноценного проекта. Сразу несколько отечественных автомобильных заводов имели необходимый опыт, но далеко не все они с энтузиазмом отнеслись к предложению «космических» конструкторов. Так, институт НАМИ и Минский автозавод не решились участвовать в столь сложном проекте, на разработку которого к тому же выделялось не слишком много времени. Ситуацию спасло СКБ ЗИЛ во главе с В.А. Грачевым. На совещании, посвященном разработке нового транспортного средства, он выразил готовность создать специальную машину, способную перевозить по пересеченной местности груз массой до 100 т – в четыре раза больше требуемой нагрузки. Несложные расчеты показали, что перспективный вездеход сможет целиком перевозить вторую или третью ступень ракеты Н-1. Более крупную и тяжелую первую ступень можно было разбирать всего на три секции. Таким образом, для перевозки всех элементов ракеты на Байконур нужно было всего пять-шесть рейсов транспортера, после чего можно было начинать сборку ракеты. В случае с железнодорожным транспортом требовался целый эшелон, а на сборку уходило бы гораздо больше времени. 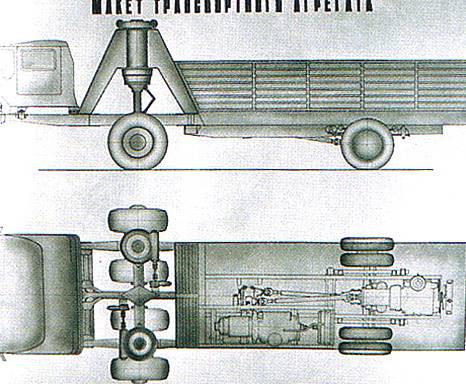 Схема опытного ЗИЛ-135Ш. Рисунок Русская-сила.рф Вскоре появился ряд документов, официально дававших старт новому проекту. Головным разработчиком транспортера для космической отрасли назначалось СКБ ЗИЛ. Проектирование специальных электрических систем поручалось СКБ московского завода №467 им. Ф.Э. Дзержинского. ОКБ-1 взяло на себя подготовку технического задания, координацию работ и содействие административного характера. В начале 1967 года несколько предприятий совместными усилиями сформировали облик будущего транспортера. Предлагалось строительство машины с грузовой площадкой размером 10,8х21,1 м. Ходовая часть должна была иметь восьмиосную конструкцию с колесной формулой 32х32. Колеса предлагалось попарно устанавливать на поворотных стойках. В каждом углу корпуса помещалось по четыре такие стойки. За счет такой конструкции ходовой части можно было обеспечить высочайшую маневренность. Полная масса достигала бы 80-100 т при полезной нагрузке около обещанных 100 т. Схема мотор-колеса с двигателем ДТ-15М. Рисунок Os1.ru Очевидно, что строительство опытного транспортера в полной конфигурации пока не имело смысла. Перед разработкой полноценного проекта предлагалось создать, построить и испытать макетный образец в упрощенной конфигурации. С точки зрения ходовой части эта машина должна была представлять собой одну восьмую полноразмерного транспортера. При помощи сокращенного состава оборудования можно было проверить основные идеи и решения, а также сделать определенные выводы и внести изменения в имеющийся проект. Макетный образец предлагалось создавать с использованием готовых узлов и агрегатов. Основными источниками комплектующих должны были стать вездеходы семейства ЗИЛ-135. К примеру, электрическая трансмиссия основывалась на агрегатах вездехода ЗИЛ-135Э. В связи с этим опытная машина была обозначена как ЗИЛ-135Ш («Шасси»). Также встречается обозначение ЗИЛ-135МШ. Следует отметить, что некоторые агрегаты были заимствованы у самолета Ил-18, но этот факт в названии проекта не отразили. 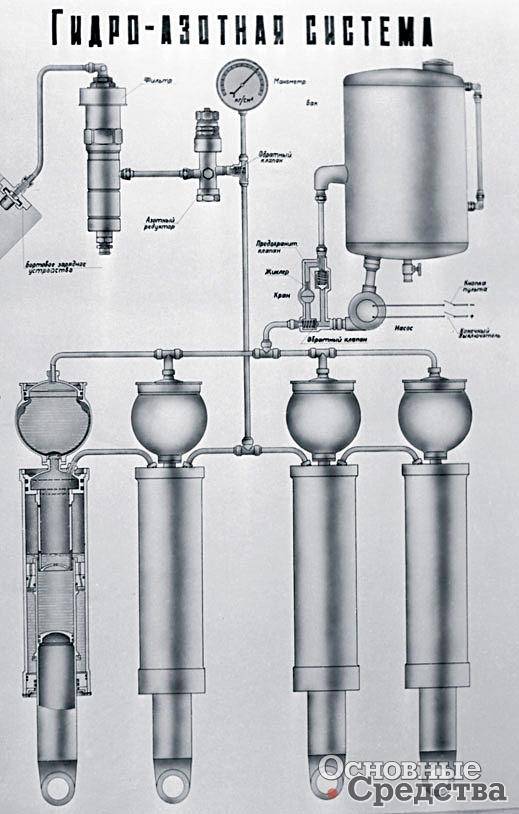 Схема гидропневматической системы машины. Рисунок Os1.ru Проектом ЗИЛ-135Ш предлагалось строительство самоходной лаборатории необычной конструкции, имеющей самые серьезные отличия от других машин сверхвысокой проходимости. Особые черты присутствовали как в составе силовой установки или трансмиссии, так и в конструкции ходовой части. В частности, последняя должна была совмещать в себе традиционные агрегаты и элементы будущего «космического» транспортера. Основой опытной машины стала рама сложной формы. Ее передняя и задняя части были выполнены прямоугольными. Между ними, сразу за кабиной, находились продольные лонжероны Л-образного профиля. Они предназначались для установки особых элементов шасси. Передний свес рамы предлагалось использовать для установки кабины, а в задней ее части помещались элементы сразу двух силовых установок. Там же расположили кузов для перевозки разных грузов или имущества. Силовая установка ЗИЛ-135Ш состояла из двух двигателей ЗИЛ-375Я мощностью по 375 л.с. Первый двигатель располагался на заднем агрегате рамы, в передней его части. В задней части платформы, непосредственно над колесным мостом, поместили второй мотор. Передний двигатель соединили с электрогенератором ГЭТ-120 мощностью 120 кВт, являвшимся основой электрической трансмиссии. Второй двигатель комплектовался гидромеханической передачей, связанной с задним ведущим мостом. По задумке конструкторов, основным двигателем был передний, входивший в состав бензоэлектрического агрегата. Второй мотор планировалось использовать в некоторых ситуациях для повышения общей мощности машины. 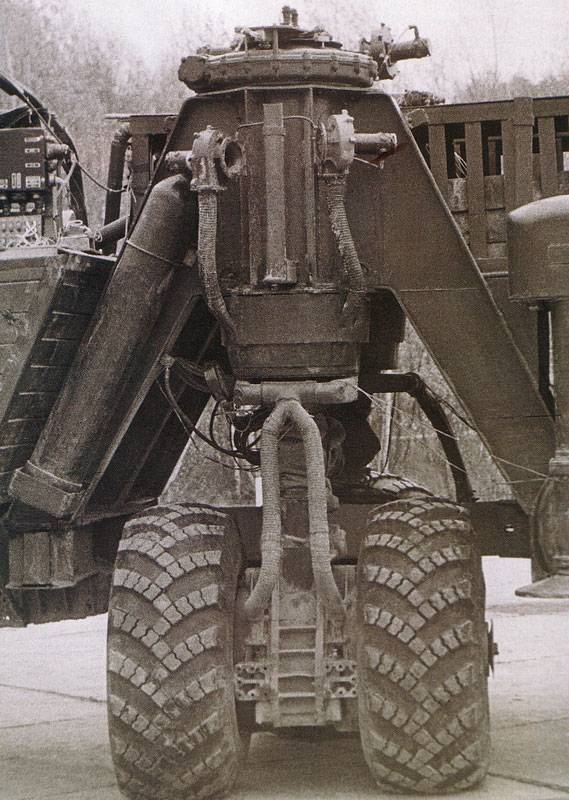 Правая стойка колес. Фото Os1.ru На Л-образных лонжеронах рамы подвешивалась аппаратура, являвшаяся главным элементом всего экспериментального проекта. На специальных вертикальных опорах помещались две стойки, построенные на основе агрегатов самолета Ил-18. Имелась вертикальная стойка, выполнявшая функции гидропневматического амортизатора подвески с ходом 450 мм. На лонжеронах монтировались электрические приводы, при помощи которых стойка могла вращаться вокруг вертикальной оси, обеспечивая маневрирование. В нижней части стоек находилась пара мотор-колес. Завод №476 разработал оригинальную синхронно-следящую систему управления перемещениями стоек. Система управления позволяла поворачивать стойку на угол до 90° вправо и влево с использованием двух режимов, по закону рулевой трапеции или параллелограмма. Также предусматривалась возможность подруливания в пределах сектора шириной 20°. Режим работы средств управления выбирал водитель. Преобразование поворота рулевого колеса в команды для приводов осуществлялось специальным аналоговым прибором, принимавшим данные с ряда датчиков и выдававшим сигналы для исполнительных механизмов. Подобные алгоритмы реализовывались впервые в отечественной практике. На общей опоре в нижней части стойки монтировалась пара мотор-колес. Ступица каждого из них вмещала электродвигатель постоянного тока ДТ-15М мощностью 15 кВт, связанный с одноступенчатым планетарным редуктором. Колеса комплектовались шинами размером 1200х500х580 мм с развитым протектором. Все четыре колеса передних стоек имели централизованную систему регулировки давления. Давление в шинах изменялось в пределах 1-3 кг/кв.см. Система управления поворотом стойки. Фото Os1.ru Две двухколесные поворотные стойки дополнялись задним мостом, необходимым для поддержки рамы в правильном положении. Мост с двухскатными колесами подвешивался на продольных рессорах. При помощи гидромеханической передачи мощность «заднего» двигателя передавалась на колеса задней оси. В связи с особой конструкцией ходовой части колесную формулу макетного образца ЗИЛ-135Ш можно описать как 6х6/4 или 4х4+2х2. Все шесть колес машины были ведущими, но привод двух задних мог отключаться. Из 6 колес 4 были выполнены управляемыми, причем поворачивались они вместе со своими стойками. Для проведения некоторых испытаний макетный образец ЗИЛ-135Ш оснастили гидравлическими домкратами. Пару таких устройств установили на бортах передней части рамы, непосредственно за кабиной. При помощи домкратов можно было вывешивать переднюю часть машины, изменяя нагрузку на колеса поворотных стоек. Силовая установка. В центре - генератор ГЭТ-120, справа виден двигатель ЗИЛ-375, связанный с задней осью. Фото Os1.ru Передний свес рамы служил основанием для кабины, заимствованной у автомобиля ЗИЛ-135К. Это был стеклопластиковый агрегат с четырьмя посадочными местами и круговым обзором при помощи остекления большой площади. В связи с применением двух автономных силовых установок с разными вариантами трансмиссии кабина получила особый набор органов управления. Дополнительный щиток со средствами контроля за электрическими системами, отличавшийся большими размерами, пришлось установить перед правым рабочим местом кабины. Отличаясь высокой сложностью, такой двойной пост управления обеспечивал полный контроль над всеми системами. Над моторным отсеком, образованным задней частью рамы, установили широкий бортовой кузов. Деревянная грузовая площадка с бортами средней высоты получила дуги для установки тента. Еще одна дуга находилась позади кабины и позволяла прикрыть брезентом лонжероны с поворотными стойками. На бортах кузова имелись дверки с подножками для посадки. По имеющимся данным, во время испытаний кузов использовался для перевозки балласта и различной материальной части, необходимой при проверке техники. Макетный образец ЗИЛ-135Ш имел длину менее 9,5 м. Ширина достигала 3,66 м, высота – 3,1 м. Снаряженная масса составляла 12,9 т. Расчетная грузоподъемность составляла 12 т, однако вся эта нагрузка должна была приходиться только на переднюю ось, образованную парой двухколесных стоек. Колесная база прототипа – 4,46 м. Колея передней «оси» по центрам стоек составляла 2 м, по центрам крайних колес – примерно в полтора раза больше. Колея заднего моста – 1,79 м. Панель управления электрической аппаратурой. Фото Gruzovikpress.ru Опытная машина нового типа, представлявшая собой демонстратор главной технологии будущего «космического» транспортера, была построена в начале лета 1967 года с максимальным использованием готовых комплектующих. В конце июня машину доставили на полигон 21-го Научно-исследовательского института Минобороны в г. Бронницы. В течение нескольких следующих месяцев макетный образец работал на полигоне и показывал свои возможности в условиях, приближенных к степям Казахской ССР. Были получены высокие результаты, и все новые агрегаты машины хорошо показали себя. Двигаясь по шоссе, ЗИЛ-135Ш разгонялся до 60 км/ч. Средняя скорость по хорошей дороге была вдвое меньше. На грунтовой дороге и луговине можно было развить скорость до 20 км/ч, на пахоте – до 10 км/ч. За время испытаний машина прошла по разным поверхностям и грунтам около 1000 км. На всех поверхностях, в том числе с низкой несущей способностью, вездеход держался уверено. Было установлено, что такой транспортер сможет нормально выполнять свои функции в предполагаемых районах эксплуатации. Одной из целей испытаний была проверка оригинальной автоматизированной системы управления колесами передних стоек. При всей своей сложности и ожидаемых рисках, подобная аппаратура справилась с возложенными на нее задачами. Автоматика правильно отрабатывала команды с рулевого колеса и обеспечивала требуемое маневрирование во всех условиях. При развороте управляемых колес на 90° удалось получить минимальный радиус поворота (по наружному колесу) на уровне 5,1 м. Машина фактически разворачивалась вокруг своей задней оси. ЗИЛ-135Ш демонстрирует возможность поворота колес на 90°. Фото Denisovets.ru Испытания макетного образца ЗИЛ-135Ш завершились успехом. Все основные технологии этого проекта могли использоваться при создании полноразмерного транспортера для ракетной техники. Еще до завершения испытаний опытного вездехода были запущены опытно-конструкторские работы по теме полноценной транспортной машины. В обозримом будущем СКБ ЗИЛ должно было подготовить всю необходимую документацию и приступить к подготовке строительства опытного образца. Параллельно с созданием нового транспортера велось проектирование «лунной» ракеты Н-1. Новый руководитель космической программы В.П. Мишин с определенного времени стал сомневаться в необходимости развертывания новой логистической системы по доставке ракет на Байконур. При всех своих преимуществах, перевозка агрегатов ракет по полупустыням и степям была связана с серьезными трудностями и рисками. Кроме того, проект транспортера оказывался слишком дорогим и сложным с точки зрения производства и последующей эксплуатации. В конце 1967 года, вскоре после завершения испытаний макетного образца ЗИЛ-135Ш, было принято принципиальное решение об отказе от новых транспортных средств необычного вида. ОКБ-1 отменило заказ на создание специального восьмиосного транспортера. Элементы ракет по-прежнему предлагалось перевозить по железной дороге. Именно так в итоге обеспечили доставку агрегатов ракет Н-1.  Макетный образец выполняет поворот вокруг собственной оси. Фото Русская-сила.рф После завершения испытаний и закрытия проекта единственный опытный образец ЗИЛ-135Ш, вероятно, был отправлен на хранение. Дальнейшая его судьба неизвестна. Сведения о его существовании в настоящее время отсутствуют. Возможно, в определенный момент его разобрали за ненадобностью. В отечественных музеях хранится несколько уникальных опытных вездеходов разработки СКБ Завода им. Лихачева, но машина ЗИЛ-135Ш среди них отсутствует. К моменту прекращения работ проект полноразмерного транспортера так и не был завершен. Позже, в середине семидесятых годов, вновь возник вопрос создания сверхтяжелого транспортера для ракетно-космической техники, но тогда задачу перевозки крупных грузов решили возложить на специально оборудованные самолеты. Наработки по специальным сухопутным шасси вновь не смогли приблизиться к практическому применению. Оригинальный макетный образец оправдал ожидания, но заказчик решил отказаться от основного проекта сверхтяжелого транспортера. В результате тема ЗИЛ-135Ш не получила развития, и наработки по ней фактически остались невостребованными. Впрочем, эта машина оставила за собой несколько любопытных званий. Прототип ЗИЛ-135Ш остался в истории как одна из самых интересных опытных машин в истории отечественного автомобилестроения. Кроме того, это был последний восьмиколесный вездеход под маркой «ЗИЛ». Все следующие машины высокой проходимости от СКБ ЗИЛ оснащались трехосным шасси. По материалам: Кочнев Е.Д. Секретные автомобили Советской Армии. – М.: Яуза, Эксмо, 2011. Автор: Рябов Кирилл |
  |
| Новая тема Ответить |
| Метки |
| бронетехника |
 Линейный вид
Линейный вид

|
|
 Похожие темы
Похожие темы
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Опытный вездеход ПЭУ-1Р | ezup | Автомобили военного назначения | 0 | 04.03.2018 21:58 |
| Опытный вездеход ЗИЛ-Э167 | ezup | Автомобили военного назначения | 0 | 25.01.2018 21:10 |
| Опытный вездеход ЗИЛ-136 | ezup | Автомобили военного назначения | 0 | 25.01.2018 02:01 |
| Опытный вездеход ЗИЛ-134 | ezup | Автомобили военного назначения | 0 | 24.01.2018 01:39 |
| Опытный транспортер-тягач ГТ-М «Объект 564» (СССР) | ezup | Бронетехника специального назначения | 0 | 17.11.2017 16:19 |