RUFOR.ORG
»
Межконтинентальная баллистическая ракета LGM-30A/B Minuteman-1
| Новая тема Ответить |
|
|
Опции темы | Поиск в этой теме | Опции просмотра |
 22.12.2013, 20:59
#1
22.12.2013, 20:59
#1
|
#1 | ||||||||||||||||||||||||||||||||||||||||||||||||||||


Чебуралиссимус
|
Базирование:
Шахтная ПУ Система управления: Программное управление Боевая часть: Спецбоеприпас Применение: Стратегические Страна: США Дальность: 9200 км. Год разработки: 1962 г. Материалы предоставлены: М.А.Пашнев (г.Обнинск)  МБР "Minuteman" относится к межконтинентальным ракетам "второго поколения", которые отличаются от МБР "первого поколения" с ЖРД ("Atlas", "Titan") применением РДТТ, меньшими габаритами и весом, повышенной надежностью и меньшим временем подготовки к запуску. МБР "Minuteman" относится к межконтинентальным ракетам "второго поколения", которые отличаются от МБР "первого поколения" с ЖРД ("Atlas", "Titan") применением РДТТ, меньшими габаритами и весом, повышенной надежностью и меньшим временем подготовки к запуску.Работы над МБР "второго поколения" были начаты в 1955 г., когда было учреждено отделение баллистических снарядов ARDC, основной задачей которого в то время было исследование проблем, связанных с созданием межконтинентальной баллистической ракеты с РДТТ. На основе проведенных исследований стало очевидным, что важнейшие проблемы разработки такой ракеты - создание нового вида твердого топлива, изготовление корпусов двигателей и методы наведения и управления - вполне разрешимы. В конце 1957г. началась разработка МБР с РДТТ, получившего название "Minuteman". Программой разработки предусматривалось создание простой, относительно дешевой ракеты, в конструкцию которой без изменения основного проекта можно было бы вносить различные усовершенствования, касающиеся силовой установки, системы наведения и боевых головок. Прогресс в области миниатюризации ядерных боевых зарядов и инерциальных систем наведения способствовал значительному сокращению веса ракеты, а применение РДТТ сократило время подготовки к запуску до нескольких секунд. Упрощение всей системы ракеты намного сократило расходы по изготовлению и эксплуатации, а также облегчило возможность рассредоточения на стартовых базах. Предполагалось создать два варианта "Minuteman" - один для запуска из подземных шахт, а другой для запуска с железнодорожных платформ. Первый испытательный запуск экспериментальной ракеты "Minuteman" со всеми снаряженными ступенями был совершен 1 февраля 1961 г. с наземной стартовой позиции на базе Канаверал. Целью запуска было испытание двигателей всех ступеней и системы наведения, а также отработка последовательности включения двигателей. Запуск прошел успешно, и ракета пролетела 7400 км. Разработка варианта ракеты для запуска с железнодорожных платформ была прекращена в декабре 1961 г. Основными причинами отмены разработки, на которую было уже затрачено 100 млн. долларов, явились высокая стоимость хранения и обслуживания ракет на железнодорожных платформах, а также относительно длительный период подготовки к запуску, так как координаты места запуска в этом случае заранее не известны. Первая серийная ракета "Minuteman" была собрана 12 апреля 1962 г., a 11 декабря 1962 г. командование стратегической авиации приняло на вооружение первые два звена ракет, получивших обозначение LGM-30A/B "Minuteman-1". В середине 1961 г. ВВС США начали изучать возможность модификации "Minuteman-1" с целью увеличения мощности боевого заряда, дальности и точности, а также упрощения всей системы и повышения ее надежности. В результате последовательной реализации этой программы в 1972 году ракеты "Minuteman-1" были сняты с вооружения и заменены новой модификацией "Minuteman-3". Состав  Двигатель первой ступени: Двигатель первой ступени:Разработан фирмой "Thiokol" (TU-122) и работает на смесевом топливе, состоящем из полибутадиеновой акриловой кислоты, перхлората аммония, алюминиевого порошка и эпоксидной смолы (см.технология изготовления). Двигатель первой ступени имеет четыре отклоняющихся сопла. Сопла 2 и 4 отклоняются вверх и вниз для управления по тангажу, а сопла 1 и 3 отклоняются в одну сторону для управления по курсу и в разные стороны для управления по крену. Угол отклонения сопел около 8°. Сопло имеет форму усеченного конуса с углом раствора 42°. Диаметр критического сечения сопла около 0.2 м, диаметр выходного сечения примерно 0.56 м. Сопла крепяться болтами к фланцам, установленном на коротких выхлопных трубах, выступающих из нижнего днища корпуса. Сопло состоит из стального основания и подвижной части, соединенных уплотнительным кольцом. Длина подвижной части сопла около 0.63 м. Подвижная часть сопла выполняется из армированной фенольной смолы с изоляционной прокладкой из пластика. В критическом сечении сопла имеется вольфрамовая вставка, укрепленная шестью графитовыми кольцами, сечение которых на передней части вставки составляет 3 см2, а на задней - 6 см2. Внутренняя поверхность сопла от критического сечения и до места с коэффициентом расширения, равным примерно четырем, имеет защитное графитовое покрытие. Отклонение сопел осуществляется по сигналам от системы наведения, которые поступают в блок управления, установленный в центральной части нижнего днища. Блок управления имеет Х-образную форму и состоит из самовключающейся серебряно - цинковой батареи, вспомогательного источника питания, четырёх гидравлических сервоциллиндров и связанного с ними электронного оборудования. Блок управления не требует внешнего питания. Сервоциллиндры и вспомогательный источник питания смонтированы на платформе, которая имеет внутренние каналы, являющиеся трубопроводами. Внешних трубороводов в системе нет. Вспомогательный источник питания состоит из мотора, гидронасоса, стопорного крана, фильтров, термосопротивления, резервуара с маслом объемом 164 , быстроразъемных штуцеров для заправки и слива жидкости, а также дистанционного выключателя давления. Гидронасос переменной производительности соединен непосредственно с компаундным двигателем постоянного тока напряжением 27 в. Отношение веса к выходной мощности этого агрегата равно 1 кг/л.с. Каждый из четырех гидроцилиндров приводов сопел жестко закреплен на платформе. Шток поршня цилиндра через плавающее зерно связан с вилкой на подвижной части сопла. Каждый привод снабжен соленоидным клапаном, приводимым в действие сигналами от сервоусилителя блока управления. Проводка от системы наведения к блоку управления находится с внешней стороны корпуса двигателя и закрыта обтекателем.  Двигатель второй ступени: Разработан фирмой "Aerojet-General" . Учитывая относительно небольшие габариты второй ступени, корпус двигателя можно было изготовить из стекловолокна. Однако исследования показали нецелесообразность такого решения, так как в трехступенчатом варианте ракеты корпус средней ступени воспринимают большие нагрузки на изгиб и при изготовлениииз стекловолокна получился бы слишком тяжелым. Поэтому в качестве конструкционного материала была выбрана сталь той же марки, что и для первой ступени (см. технология изготовления). Двигатель второй ступени имеет четыре отклоняющихся сопла, которые крепятся к выхлопным трубам на нижнем днище. Каждое сопло имеет форму усеченного конуса и коэффициент расширения 18. В критическом сечении сопла находится вольфрамовая вставка, удерживаемая в графитовой прокладке толщиной около 25 мм. Выхлопной конус сопла выполнены из армированного пластика. Сопла отклоняются с помощью такой же гидросистемы, как и на первой ступени. Каждое сопло может отклоняться в пределах 6°. В отверстие, имеющееся в центре верхнего днища конуса, вставляется воспламенитель, представляющий собой небольшой РДТТ, топливо которого весит около 900 г и по составу фактически такое же, как и основное топливо двигателя. Воспламенитель входит внутрь топливного заряда примерно на 0,5 м и имеет предохранительное устройство, одинаковое у воспламенителей всех трех ступеней. Двигатель третьей ступени: Разработан фирмой "Hercules" и работает на двухосновном топливе, основные компоненты которого включают перхлорат аммония с алюминиевым порошком и нитроглицерин-нитроцеллюлозу, служащих также связующим веществом (см. технология изготовления). Каждое сопло, как и на первых двух ступенях, состоит из неподвижного основания и поворотного выхлопного конуса, способного отклоняться на угол 4°. Диаметр критического сечения сопла около 0,09 м, диаметр выходного сечения примерно 0,38 м, коэффициент расширения 18. Выхлопной конус сопла выполнен методом формовки под давлением при высоких температурах. На внутренней стенке сопла находится изоляционное покрытие, состоящее из слоя армированной кварцевым волокном фенольной смолы и слоя пропитанной смолой графитовой ткани. Графитовая ткань обладает высокой теплопроводностью, а армированная фенольная смола - низкой. В критической части сопла устанавливается вольфрамовая вставка на графитовой прокладке. Воспламенитель двигателя третьей ступени вставляется в центральное отверстие нижнего днища. Он состоит из небольшого заряда твердого топлива, горение которого начинается в результате воспламенения пороховых шариков. Воспламенитель снабжен предохранительным устройством. Переключатель системы подрыва заглушек для выключения двигателя расположен на верхней юбке корпуса. Снаружи корпуса в обтекателе размещается электропроводка от системы наведения к блоку управления соплами. Соединение всех ступеней ракеты осуществляется через переходники в виде усеченных конусов. Крепление производится с помощью болтов. Все ступени ракеты снабжены самоликвидаторами, расположенными под обтекателями электропроводки. Система управления: Система наведения инерциальная, разработанная отделением "Autoneсtics" фирмы "Nord American". Основными элементами системы наведения являются инерциальная платформа, миниатюрный вычислитель D.17 и стандартные электронные блоки, выполненные на транзисторах. Все оборудование системы наведения размещается в герметичном контейнере диаметром 1,14 м, заполненном гелием, который обеспечивает охлаждение электронных приборов. В основании контейнера находится вентилятор и теплообменник жидкостного топлива. Снаружи контейнер покрыт изоляцией из стеклоткани и перед установкой на ракету помещается в алюминиевый кожух монококовой конструкции со специальным защитным покрытием. По имеющимся сведениям, блок системы наведения весит около 81,8 кг. Электропитание оборудования системы наведения обеспечивается серебряно-цинковыми батареями. Инерциальная платформа системы наведения установлена на кардановом подвесе и может свободно поворачиваться на 90° относительно оси тангажа, на ± 70° относительно оси крена и на ±20° относительно оси курса. Платформа стабилизируется двумя двухосевыми свободными гироскопами, роторы которых установлены на газовых подшипниках. Один гироскоп служит опорным для осей тангажа и крена, а другой - для оси курса (одна из осей этого гироскопа остается свободной). Двухосевые гироскопы с газовыми подшипниками были выбраны потому, что они обеспечивают хорошую динамическую устойчивость в течение длительного времени и способны выдерживать большие перегрузки. Для обнаружения смещения корпуса гироскопа относительно ротора применяются датчики ёмкостного типа. При хранении ракеты в шахте для корректировки положения гироскопа тангажа и крена относительно местной вертикали на платформе имеется двухосевой датчик уровня, а постоянное выравнивание гироскопа курса относительно-опорного азимута осуществляется с помощью оптического коллиматора. Для измерения ускорений по каждой из трех осей на инерциальной платформе установлены три интегрирующих акселерометра. В каждом акселерометре имеется маятниковая масса, плавающая в жидкости для уменьшения трения. Ускорение по чувствительной оси любого акселерометра смещает его массу, в результате чего образуется сигнал, который усиливается и передается на приводимый моторчиком тормозной колпачок , создающий вихревые токи и крутящий момент для возвращения массы в ее исходное положение. Для контроля за работой акселерометров на платформе имеется три двухосевых датчика уровня, которые используются также для периодической калибровки акселерометров. Входящий в систему наведения вычислитель, помимо основной функции расчета уравнений наведения выполняет ряд дополнительных функций, связанных сборкой ракеты и его проверкой как во время хранения в шахте, так и при подготовке к запуску. При сборке ракеты вычислитель используется для проверки каждой ступени, включая испытания блоков управления соплами, устройств для разделения ступеней и других элементов. После установки ракеты в пусковую шахту вычислитель осуществляет постоянную и периодическую проверки всех систем ракеты в течение всего срока хранения. При постоянной проверке осуществляется качественный контроль всех систем, а при периодической проверке проводится более тщательный контроль, при котором определяется точность действия каждого элемента и отклонения в характеристиках, а также автоматически вносятся необходимые поправки. Различие в двух указанных выше типах проверки можно проследить на следующем примере. При постоянной проверке блока системы управления в усилитель этого блока подается сигнал для определения того, что сервоприводы отклоняют сопла в нужном направлении, а при периодической проверке, кроме того, определяется и время реакции приводов на поданный сигнал. При подготовке ракеты к запуску вычислитель проводит предстартовую проверку и отсчет времени. После запуска ракеты вычислитель выполняет расчеты наведения , определяет время отделения ступеней, выдает команду к выключению двигателя последней ступени, определяет момент отделения носового конуса и взведения боевого заряда таким образом, чтобы он поразил намеченную цель. Вычислитель решает основные уравнения наведения и управления с учетом аэродинамических характеристик ракеты и вырабатывает сигналы управления на основе данных об относительном положении ракеты, поступающих от гироскопов и акселерометров. Таким образом, вычислитель выполняет функции преобразователя сигналов системы наведения в форму, удобную для привода органов управления. Вычислитель является счетно-решающим устройством общего назначения с 27-значным кодом, в котором для вычислений используются 24 знака. Блок памяти вычислителя представляет собой магнитный диск, вращающийся со скоростью 6000 об/мин. Емкость этого блока на ракетах первой модификации составляет 2985 слов. Вычислитель принимает 43 типа данных от различного оборудования и осуществляет два основных цикла вычислений: один цикл обеспечивает решение уравнения наведения (где находится ракета в данный момент по отношению к тому, где она должен находиться, чтобы поразить цель), а другой - расчёт сигналов для системы управления. Вычислитель выдаёт три пары выходных цифровых сигналов для ввода поправок в гироскопы и три выходных напряжения в аналоговой форме для привода в движение сопел управления по тангажу , курсу и крену. Кроме того, для проведения проверочных испытаний вычислитель подает сигнал для привода в действие перфоратора бумажной ленты или электрического телетайпа, регистрирующих результаты испытаний. При экспериментальных запусках вычислитель используется также для подачи сигнала к действию телеметрической системы. Вычислитель спроектирован таким образом, что путем изменения информации, поступающей в блок памяти, его можно полностью перепрограммировать. Для ввода данных в блок памяти вычислителя используется размещенный на транспортере программатор, который подводится к пусковой шахте и посылает в блок памяти данные, необходимые для поражения определенной цели. Все находящиеся в пусковых шахтах ракеты "Minuteman" предварительно программированы на поражение заранее выбранной цели. Поскольку вычислитель осуществляет целый ряд сложных функций, связанных с проверкой и калибровкой ракеты необходимо наличие каких -то приборов, проверяющих работу самого вычислителя. В системе "Minuteman" для этого используется специальный блок, размещенный в кольцевом помещении верхней части пусковой шахты. 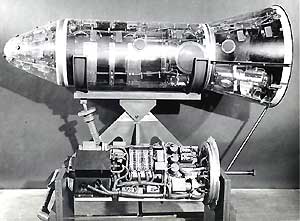 Боевая часть: Боевой заряд - ядерный с тротиловым эквивалентом 1-2 Мгт. Боевой заряд размещён во входящем в атмосферу носовом конусе обгорающего типа. Отделение носового конуса от третьей ступени при достижении заданной скорости и местоположения осуществляется реверсированием тяги двигатель третьей ступени и подрыва заглушки в центральном отверстии верхнего днища. Реверс тяги синхронизирован с освобождением замков крепления носового конуса Тактико-технические характеристики
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
  |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
| Новая тема Ответить |
| Метки |
| МБР LGM-30A/B Minuteman-1 |
 Линейный вид
Линейный вид

|
|
 Похожие темы
Похожие темы
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Межконтинентальная баллистическая ракета M51 | ezup | МБР морского базирования | 0 | 11.06.2017 17:01 |
| Межконтинентальная баллистическая ракета M51 | ezup | Стратегические | 0 | 22.12.2013 23:33 |
| Межконтинентальная баллистическая ракета LGM-30F Minuteman-II | ezup | Стратегические | 0 | 22.12.2013 20:55 |
| Межконтинентальная баллистическая ракета LGM-30G Minuteman-3 | ezup | Стратегические | 0 | 22.12.2013 20:48 |
| Межконтинентальная баллистическая ракета Тополь (РС-12М) | ezup | Стратегические | 0 | 21.12.2013 01:35 |